💿
NovAtel Inertial Explorer
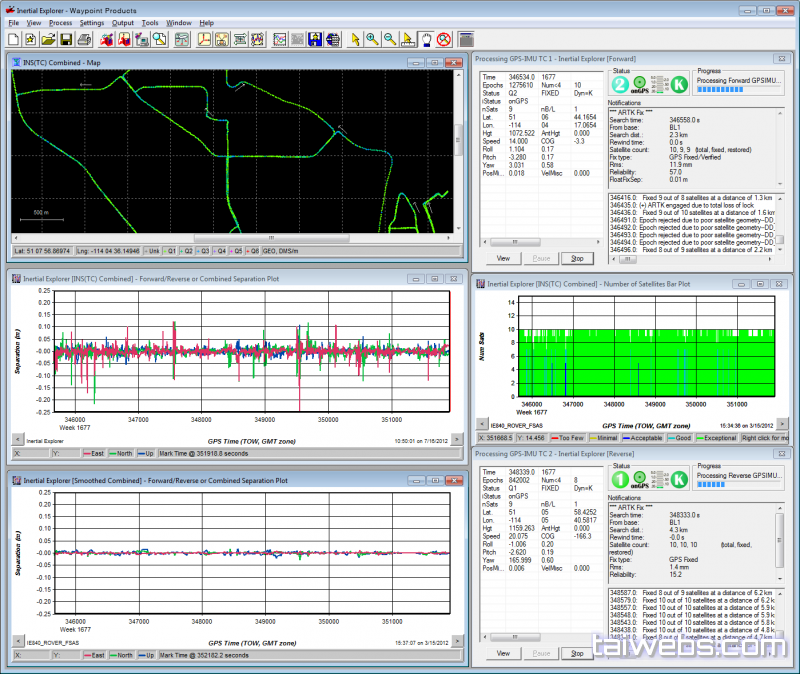
NovAtel Inertial Explorer는 위성항법 시스템과 관성센서를 통합하여 정밀한 위치, 속도, 자세 정보를 제공하는 전문 데이터 처리 소프트웨어입니다.
바이러스
검사 완료
검사 완료
고속
다운로드
다운로드
누적
111
111
📦
파일 크기
199 MB
🔑
라이선스
크랙
⬇️
다운로드
111
📅
업데이트
2026-03-13
🏢
개발사
NovAtel
💻
운영체제
Windows
NovAtel Inertial Explorer는 글로벌 위성항법 시스템(GNSS)과 관성측정장치(IMU)의 통합 데이터를 처리하여 높은 정확도의 측위 결과를 산출합니다. 광학 광섬유 자이로부터 저비용 MEMS 센서까지 다양한 관성센서 장비를 지원하며, 자동화된 처리 환경 인식 기능으로 사용자 경험을 극대화합니다. 프로젝트 가이드와 자동 품질 검증 기능을 통해 빠르고 신뢰성 높은 결과 도출이 가능합니다.
- 다중 GNSS 체계(GPS, GLONASS, BeiDou, 갈릴레오, QZSS) 완벽 지원
- 정밀단일점 측위(PPP) 기술 적용
- 공중, 지상, 보행, 해양 등 다양한 환경별 자동 처리 프로필
- IMU와 카메라 축 오정렬 자동 보정 기능
- HTML 형식 품질 관리 보고서 자동 생성
- 구글 어스, RIEGL, DXF, SBET 등 다양한 포맷 직접 출력
활용 분야: 항공 항법 측량, 모바일 지도 제작, 드론 항법, 수로 조사 등 정밀 위치 정보가 필요한 모든 분야에서 활용됩니다.
🖼️ 스크린샷
주요 기능
✦
HTML 형식의 품질 관리 보고서 자동 생성
✦
GPS와 관성센서 통합 처리 기능
✦
정밀단일점 측위(PPP) 기술 지원
✦
ASCII 형식의 이동 경로 데이터 출력
✦
카메라-IMU 축 오정렬 자동 보정 모듈
✦
전 주파수 위성항법 신호 처리(L1+L2, L1+L5 지원)
✦
환경별 자동 인식 처리(공중, 지상, 보행, 무인항공기, 해양)
✦
IMU 장착 위치와 카메라 프레임 기준 자동 거리 계산
✦
다중 출력 포맷 지원(구글 어스, RIEGL, DXF, SBET)
✦
프로젝트 기반 직관적 워크플로우 설계
최소 사양
운영체제
Windows 10 (64bit)
프로세서
Intel i3 / AMD Ryzen 3
메모리
4 GB RAM
저장공간
500 MB 여유 공간
권장 사양
운영체제
Windows 11 (64bit)
프로세서
Intel i5 / AMD Ryzen 5 이상
메모리
8 GB RAM 이상
저장공간
1 GB 이상
v8.80.2720
2026-03-13
- 최신 빌드 반영
- 호환성 이슈 수정
- 성능 안정화 작업 적용
1
다운로드 버튼을 눌러 NovAtel Inertial Explorer 설치 파일을 받습니다.
2
압축 파일이 포함된 경우 지정된 경로에 모두 해제합니다.
3
Setup 또는 메인 설치 파일을 관리자 권한으로 실행합니다.
4
설치 옵션을 확인한 뒤 기본 경로 또는 원하는 경로를 선택합니다.
5
설치 완료 후 필요한 보조 파일이나 패치를 동일 경로에 반영합니다.
6
NovAtel Inertial Explorer을 실행해 버전과 정상 동작 여부를 확인합니다.
⚠️ 주의사항
- 설치 전 기존 NovAtel Inertial Explorer 버전이 실행 중이면 종료 후 진행하세요.
- 실시간 보호 프로그램이 설치 파일을 차단하면 예외 경로를 먼저 확인하세요.
- 업데이트 적용 전 중요 설정과 작업 파일은 별도로 백업해 두는 편이 안전합니다.